
【科研动态】武汉理工大学在手术机器人操作力光纤感知方面取得新进展
2025年4月,机器人领域顶级期刊International Journal of Robotics Research(简称IJRR,年发文量80~90篇)刊登了武汉理工大学机电工程学院周祖德教授团队的李天梁教授医工交叉课题组在手术机器人操作力光纤感知方面取得的突破性进展“Step-coated FBG and runway-shaped beam 6-D F/T sensor with dynamic self-fault-tolerant for orthopedic surgery robot”。武汉理工大学机电工程学院为第一完成单位,机电工程学院博士生赵琛为第一作者,李天梁教授为唯一通讯作者。
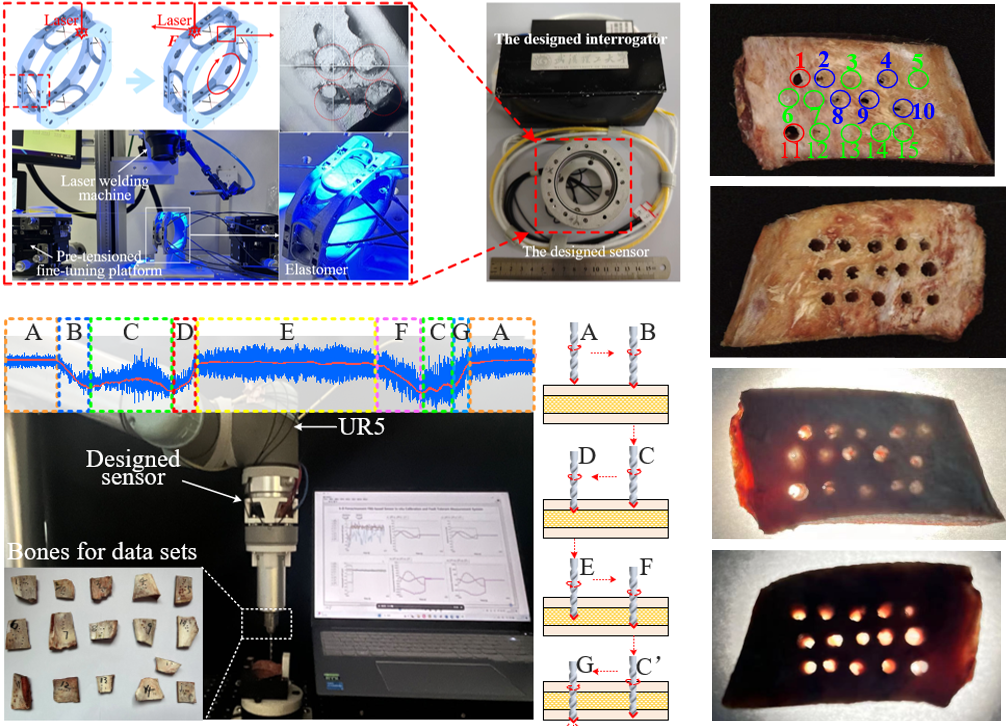
阶跃变径光纤光栅六维力/力矩感知与力反馈的骨科手术机器人
精准感知手术操作力对提高手术机器人操作安全性与精细化水平至关重要。光纤传感器为手术机器人操作力感知提供了一种新手段,但存在光纤光栅热-力串扰、光纤与金属器械胶粘互连临床适应性差,以及临床使役下多维力解耦精度保持难等问题,使其始终尚未走出实验室。因此,李天梁教授课题组通过研究提出了手术机器人阶跃变径光纤光栅六维力/力矩传感器,解决了骨科手术机器人六维力/力矩与温度的高精度同步解耦难题;运用提出的金属化光纤激光熔融固结封装工艺,突破了传统胶粘封装的光纤力感知器械术前热消毒(180℃)耐受性差、易脱粘失效等难题,并将手术操作力高精度(≤5.96%F.S)传感保持能力从短时(传统胶粘封装)提升至半年以上;发明了手术机器人多维力光纤容错解耦测量方法,相比常规无容错的多维力解耦方法,在5%测量精度下对传感光纤断裂容错可校率从零提升至25.7%;依此建立的骨科手术机器人钻孔阶段自识别的智能监测系统,实现了机器人对骨组织自主钻孔操作,为光纤力传感技术临床推广奠定了理论与技术基础。
武汉理工大学李天梁教授带领的医工交叉课题组致力于光纤传感与手术机器人融合方面研究,自2019年以来先后承担了国家重点研发计划、国家自然科学基金、湖北省JD计划任务、湖北省重点研发计划等国家级和省部级项目10项,以及企业横向多项。在Nat. Commun.、Adv. Sci.、Small、IJRR、IEEE T-IE、IEEE/ASME T-MECH、MSSP、《机械工程学报》和ICRA等高质量期刊与国际会议上发表论文90余篇,获中国电子学会-腾讯Robotics X犀牛鸟专项研究计划优秀奖、IAMM科学家奖章、中国计量测试学会科学技术进步奖二等奖、湖北省技术发明二等奖等。
(文/编:余佩 审核:吴飞)